My introduction to robotics - My 5 minutes a day #81
Industry's best friend
Hello Everyone. Many people, including myself a week ago, think that engineers who study robotics have to go through countless hours of checking the circuits that comprise these devices. In fact, when you're beginning, this is far from the truth.
Then, what do we focus on? Movement.
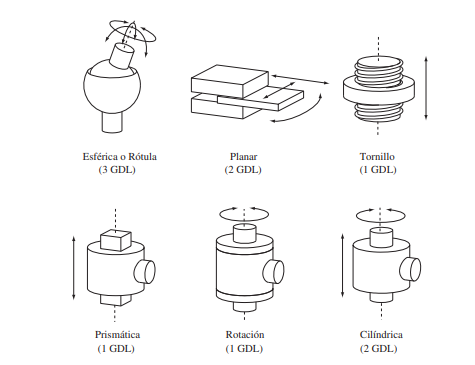
The physical part of each robot is formed by a combination of parts called articulations, which emulate the movement of a human being to a certain extent. When we take a look at these, we have to check the amount of independent movements with regard to past articulation (Meaning that If you move this articulation, the other ones won't move).
These independent movements are what we call degrees of freedom, and the degrees of freedom that we can see are either lineal (Following an x,y axis), rotational or angular.
Even If in practice, robots tend to use articulations with 1 degree of freedom, there are cases where this doesn't suffice. That's why, we find articulation with up to 3 Degrees of Freedom, as we can see in this image:
Now that we know these articulations, we can see the most common robot configurations based on these.
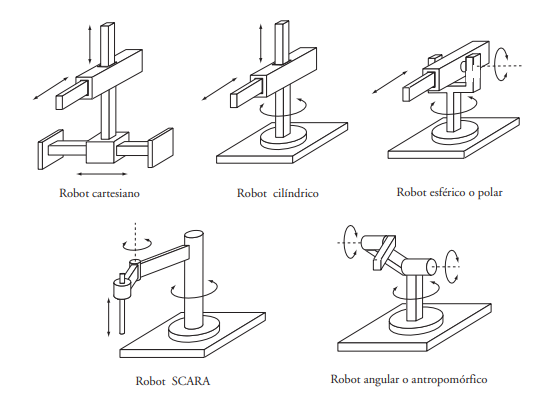
The first one is the cartesian robot, with a movement that follows linear movements in the x,y and z axes, hence the reason for this name.
The cylindric robot keeps two of the movements, while It adds a rotational movement to the 'hip' of the robot, following a cylindric pattern.
The polar robot has 1 rotational movement, 1 angular and one lineal, describing a spheric movement.
The SCARA robot has two rotational movements and one linear movement.
Finally, the angular robot has a rotational movement and two angular ones, making them the most common type of robot that we can find in the industry.
However, we still have to go through the concept of volume of work, but that will be a topic for another edition. Until then!